
From 'VyatSU: Biography Pages' by V. Shishkin, 1998.
"…You can find peoples on Earth that never knew a wheel in their history. These are some tribes of Tibet and the Amazon Jungle. Ancient Aztecs seem to be unaware of the wheel as well. The reason is that the geographical peculiarities of their living areas did not allow using the rolling motion principle. A wheel demands a road. A wheel-cart cannot move in mountain ridges, swamps, and impenetrable forests. Such a terrain demands a different way of physical body motion, for example, step moving.
One of the greatest science-fiction writers in our century Herbert Wells put the Martians in three-legged stilt machines in his 'War of the Worlds' but not without reason. As the science-fiction author thought, being more developed than the Earthmen, the Martians described in his novel had to choose step moving as a more improved way of motion.
And now, let us take Lunokhod-1 (Moon Walker) self-mobile rover that was delivered onto the surface of our satellite by Luna-17 (Moon) automatic station in November 1970. And of course, its design included a wheel, eight wheels to be more exact, four at each side of the rover. But step moving was not turned down. Recall from TV reporting how the device got over obstacles in its way: it advanced one wheel as if a man would try its way by foot. It "tucked up" its leg when touching a big stone. It was the combination of these two moving principles that made the rover surprisingly capable of passing over any surface.
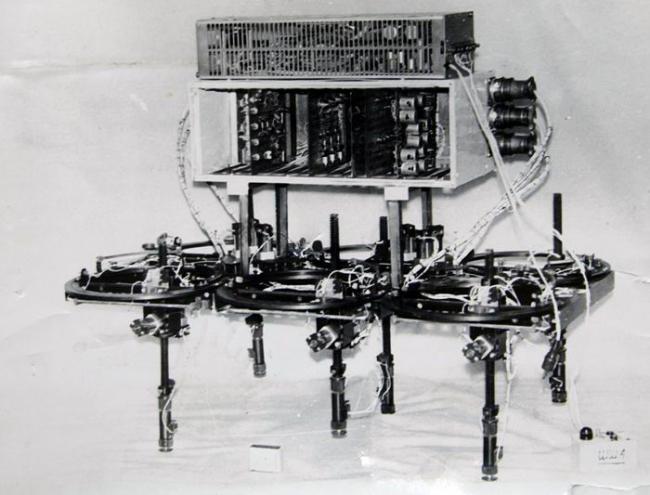
It happened that Anatoly Andreevich Shibanov was also convinced in urgency and prospects of robotic systems combined with walking devices when he started complicated and unusual work in the early 1980s. His aim was to create science-based methods of research, correct decision on design factors and automation systems for highly maneuverable walking machines using modular approach. However, Shibanov's experiments led to a kind of a walking mechanism described by Wells just not of three but of four, five, or six legs; and not even of legs but to be more exact of modules, or complete technical joints that included metallic limbs. Being linked together to make a single thing several modules made up a perfect walking device which Shibanov intended to use in barely passable places and in unfavorable conditions where the presence of man is undesirable or impossible.
The work of this kind was formerly conducted in our country as well, namely, at Blagonravov Engineering Science Institute under the USSR Academy of Science. Anatoly Shibanov successfully defended the dissertation on his machines at this Institute. But the Kirov scientist used in research and applied in practice some new developments. They mainly concern the control system: a control system module-block corresponds to each constructive module-drive in Shibanov's device. It meant that each device unit "thought" on its own which increased its maneuverability and made the device mobility optimal. And surely, the unique circuitry of the modules themselves was introduced.
Anticipating things, we may say that Shibanov's walking device was protected by a certificate of authorship. Earlier he, together with V. V. Sumin, V. V. Kuklin, N. V. Vladimirov, A. L. Nosov, and N. M. Tatarinov, received a copyright for the asynchronous short-circuit (squirrel-cage) motor which later was used in a half-unreal but very functional development as it turned out later.
Kirov scientist's device could change its walking manner, speed up or slow down its motion, turn round, or move backward. Besides, the trajectory of the walking device could be formed in two ways: programmatically, when required movement settings were programmed and input into the control system in advance, and adaptively, when these settings were input during the motion process.
So, Anatoly Shibanov created a walking robot capable of learning during its action and therefore having great prospects. Moreover, when Chernobyl tragedy happened, the device created in Kirov could reach those damaged and barely passable places. Buttheysentpeoplethere…
Shibanov's development is a technical equipment of tomorrow. It will certainly be called for in the future. And we should mention in this connection that Anatoly Shibanov was not the only one in Kirov Polytechnic Institute who worked at robotic systems. This research area has been developed at the Department of Electrical Drives and Automation of Industrial Installations which was founded on the basis of the subject commission under the same title in 1972. Its head was Candidate of Technical Sciences M. V. Kokovikhin, and later his counterpart N. P. Protasov. In the same year of 1984 when Shibanov demonstrated his new and unusual design to his opponents during the dissertation defense at Moscow Engineering Science Institute, the Department of Electrical Drives in Kirov Polytechnic Institute opened a new specialization of Robotics. Three years later this specialization grew up into the dedicated faculty of engineer retraining courses on new prospective trends in science, engineering and technology, and the specialization was handed over to this faculty.
By no means, these devices do not equal with A. Shibanov's work neither by their appearance nor by their functions. They are meant for a different purpose. Industrial robots are programmed devices aimed to perform several technical operations or even a single one on an assembly belt line or in a workshop but to do it at a much greater speed and with a much higher quality than a man could. We should give credit to the Department of Electrical Drives which even in those years started its work in the field of robotics that later conquered all the industrial world.